Szerver/Üzlet
sulaki - 2017-03-19
A Siemens kiterjesztette a Simotion mozgásvezérlő megoldásait a feldolgozógépekre
A Siemens kiterjesztette a Simotion mozgásvezérlő megoldásait a feldolgozógépekre, ideértve a prizmatikus tekercselést és az öntanuló hibakompenzálást (LECo). A prizmatikus tekercselés funkció a nem kör alakú tekercselő testeknél kompenzálja az úthossz különbségeket. A módszer előnyei a jobb tekercselési minőség, a nagyobb gépsebesség és a megbízhatóbb folyamat. Az új öntanuló „LECo” (Learning Compensation) funkció kompenzálja a folyamat ciklikus zavarójellemzőit, és gyorsan helyreállítja a feldolgozás és a termék kívánt minőségét. Az eltéréseket, mint például egy tekercselőtengely mechanikai ütés kiváltotta beállítási hibáit, már egy ciklus után is képes kompenzálni a rendszer. Az új Simotion alkalmazások többek között akkumulátor elektródák gyártásánál, valamint hullámlemezek és anyagtekercsek feldolgozásánál nyújthatnak ideális megoldást.
A nem kör alakú hengeres, közel elliptikus testekre történő tekercselés esetén változik az anyag alátámasztási pontja és a terelőhenger közötti hossz. Ezeket a változásokat korábban mechanikus módon, vagy változó tekercselési sebesség alkalmazásával egyenlítették ki. A prizmatikus tekercselésre kidolgozott új Siemens mozgásvezérlő megoldás ciklikusan előre kiszámítja az anyag alátámasztási pontjait a terelőhengeren és a tekercselőtesten, és ezeket az adatokat betáplálja a vezérlőegységbe. A géptervező számára biztosított előnyök a jobb tekercselési minőség, nagyobb gépsebesség és a megbízhatóbb feldolgozás.
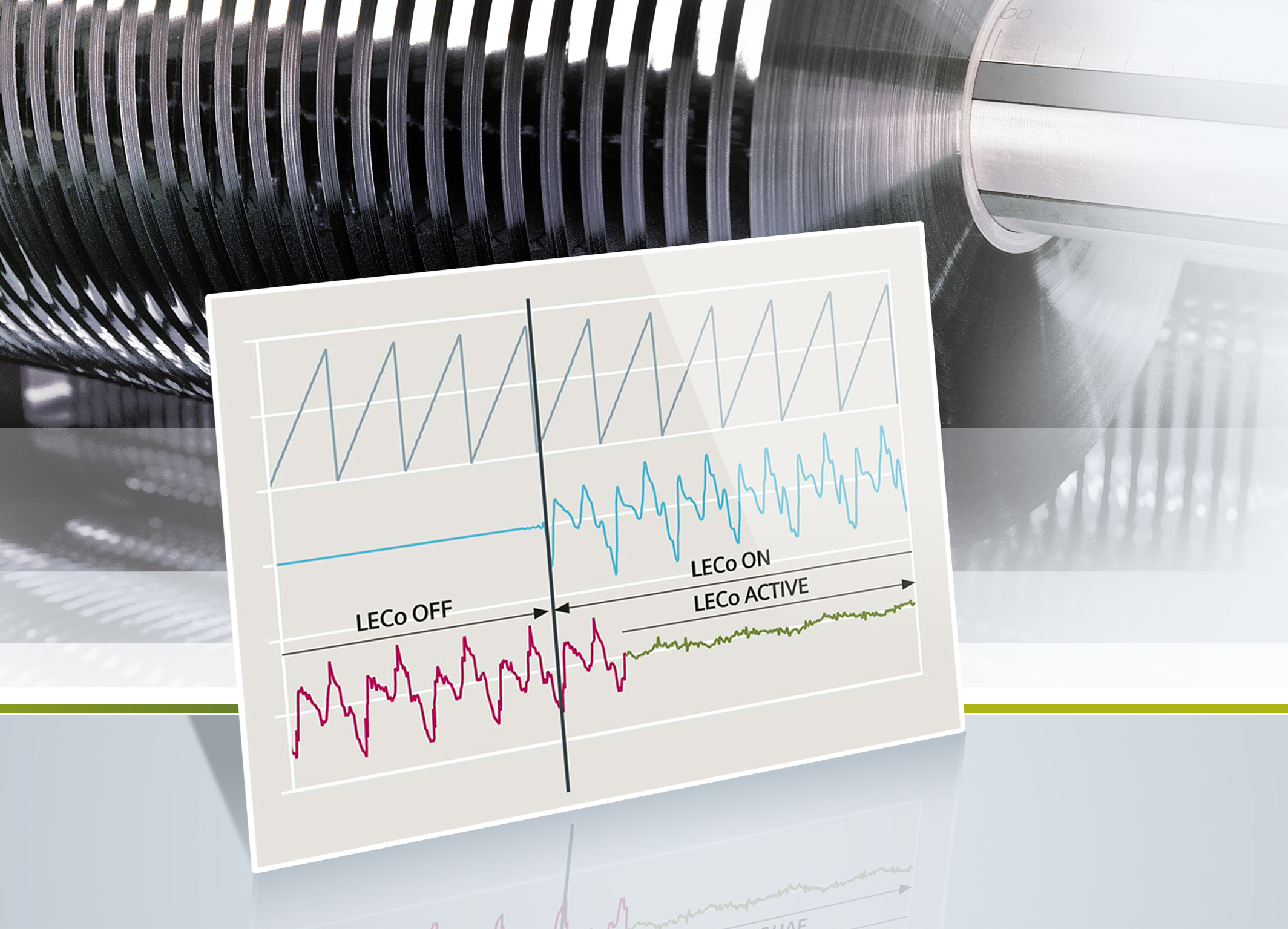
Az új öntanuló LECo alkalmazás a korábbi dinamikus pozíciószabályzókat váltja fel. Ezek a szerkezetek korrigálták ugyan a tengelyek például valamilyen mechanikai ütés okozta pozícióhibáit, de csak bizonyos késéssel. A tekercselő tengelyek folyamatos megfigyelése révén az új Siemens megoldás azonnal észleli az eltéréseket, az aktuális hiba alapján kiszámolja a vezérlés előtti értéket, és a következő ciklusban ezt az adatot betáplálja a vezérlőegységbe. Az eltérések nagyrészt már az első ciklust követően kompenzálódnak. A következő ciklusok során a tanuló
A nem kör alakú hengeres, közel elliptikus testekre történő tekercselés esetén változik az anyag alátámasztási pontja és a terelőhenger közötti hossz. Ezeket a változásokat korábban mechanikus módon, vagy változó tekercselési sebesség alkalmazásával egyenlítették ki. A prizmatikus tekercselésre kidolgozott új Siemens mozgásvezérlő megoldás ciklikusan előre kiszámítja az anyag alátámasztási pontjait a terelőhengeren és a tekercselőtesten, és ezeket az adatokat betáplálja a vezérlőegységbe. A géptervező számára biztosított előnyök a jobb tekercselési minőség, nagyobb gépsebesség és a megbízhatóbb feldolgozás.
Az új öntanuló LECo alkalmazás a korábbi dinamikus pozíciószabályzókat váltja fel. Ezek a szerkezetek korrigálták ugyan a tengelyek például valamilyen mechanikai ütés okozta pozícióhibáit, de csak bizonyos késéssel. A tekercselő tengelyek folyamatos megfigyelése révén az új Siemens megoldás azonnal észleli az eltéréseket, az aktuális hiba alapján kiszámolja a vezérlés előtti értéket, és a következő ciklusban ezt az adatot betáplálja a vezérlőegységbe. Az eltérések nagyrészt már az első ciklust követően kompenzálódnak. A következő ciklusok során a tanuló
algoritmus
folyamatosan figyeli a kompenzáció eredményét és elvégzi a vezérlés finomhangolását, így növelve az eljárás pontosságát.






